Challenge
Design and fabricate a joystick-controlled machine to navigate a game stage, retrieve various items, and deposit items in designated receptacles.
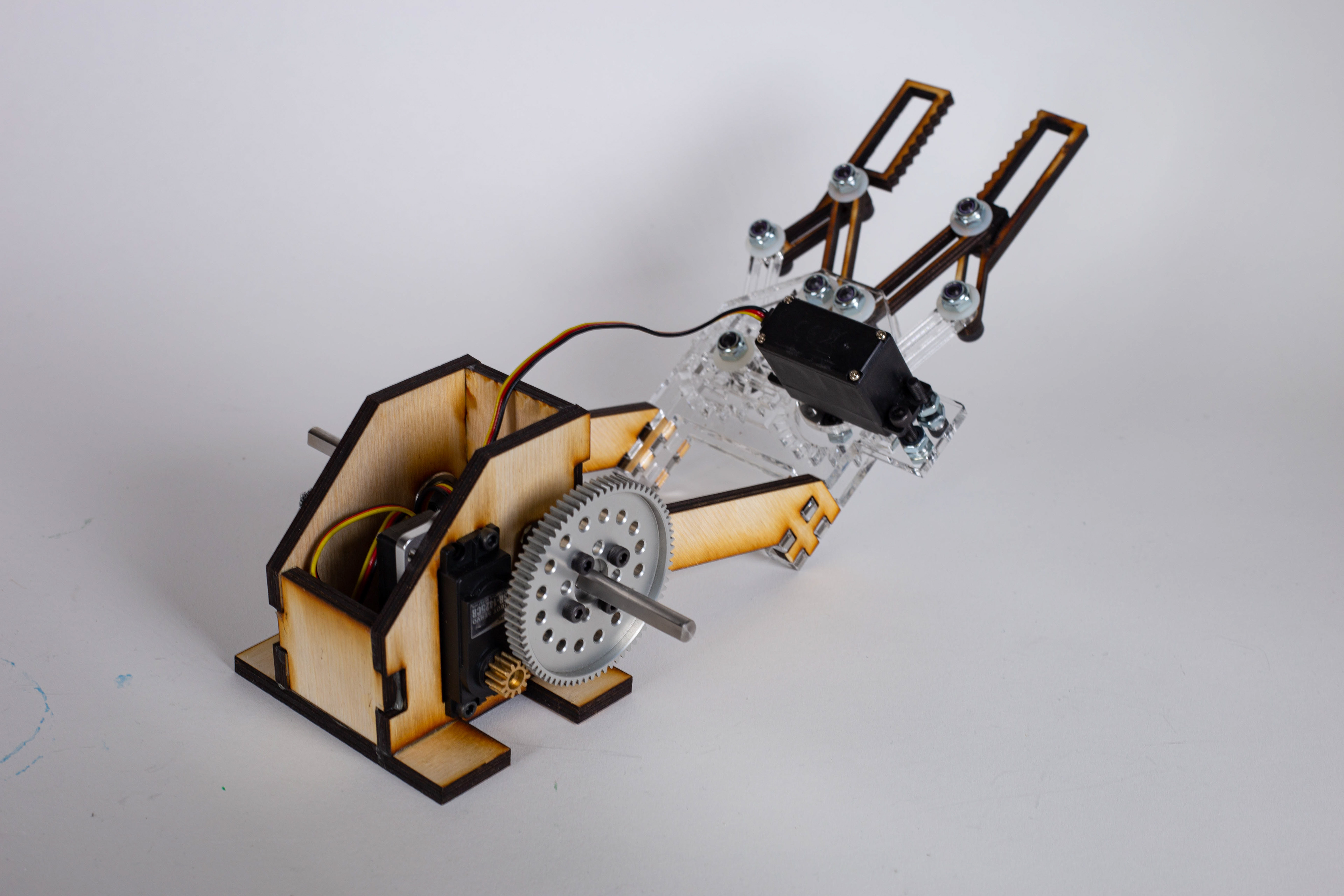
Claw + Tower
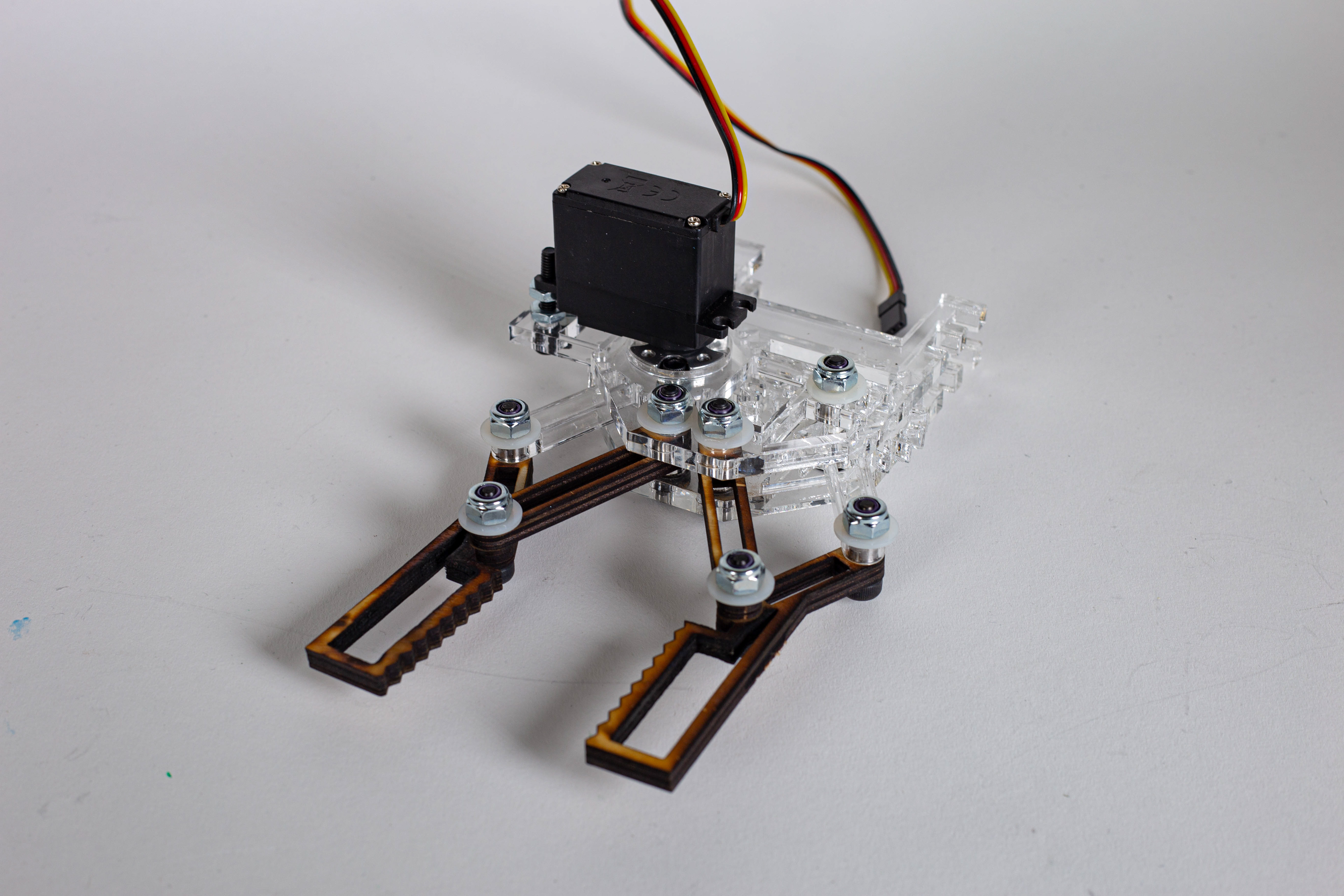
Claw
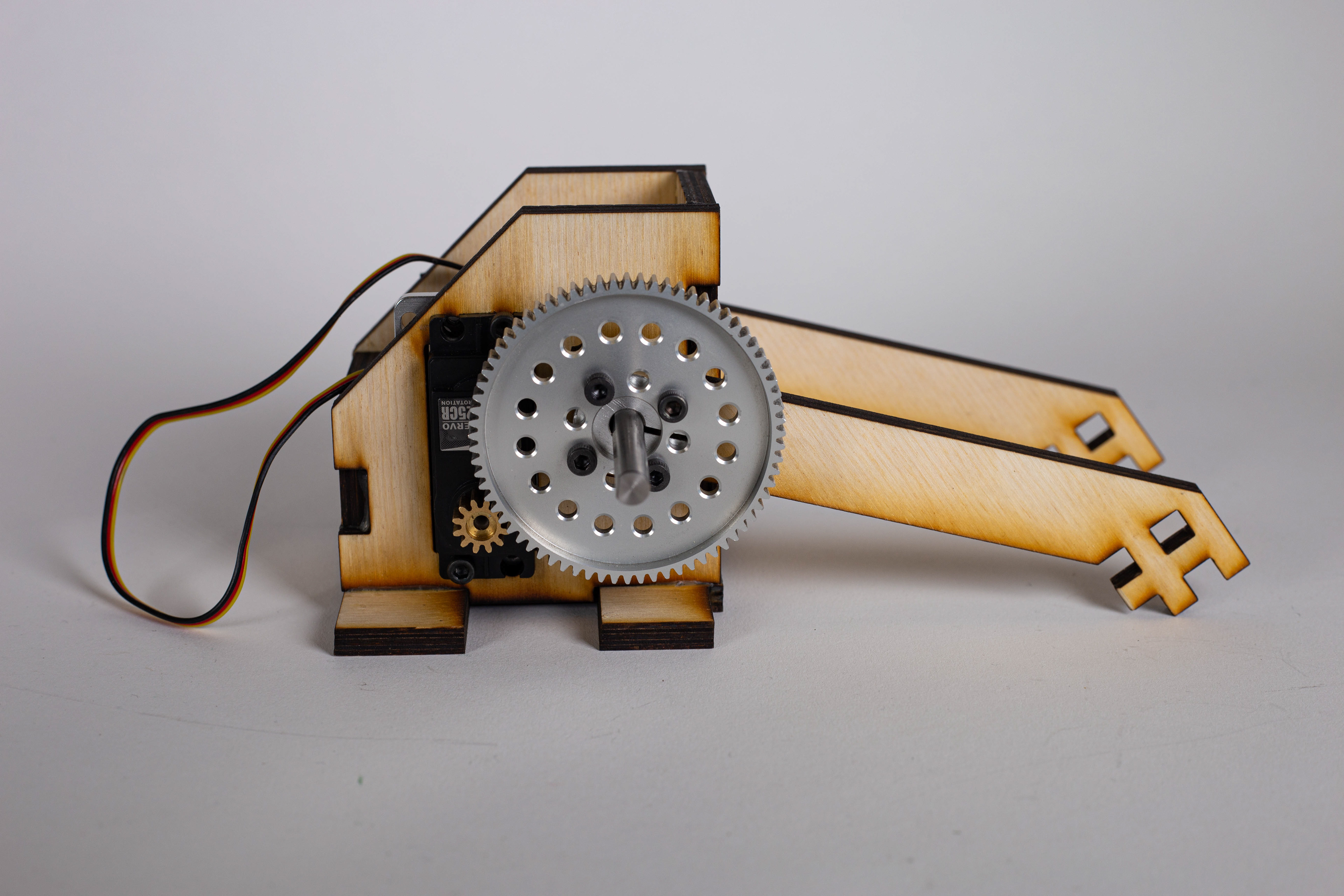
Tower
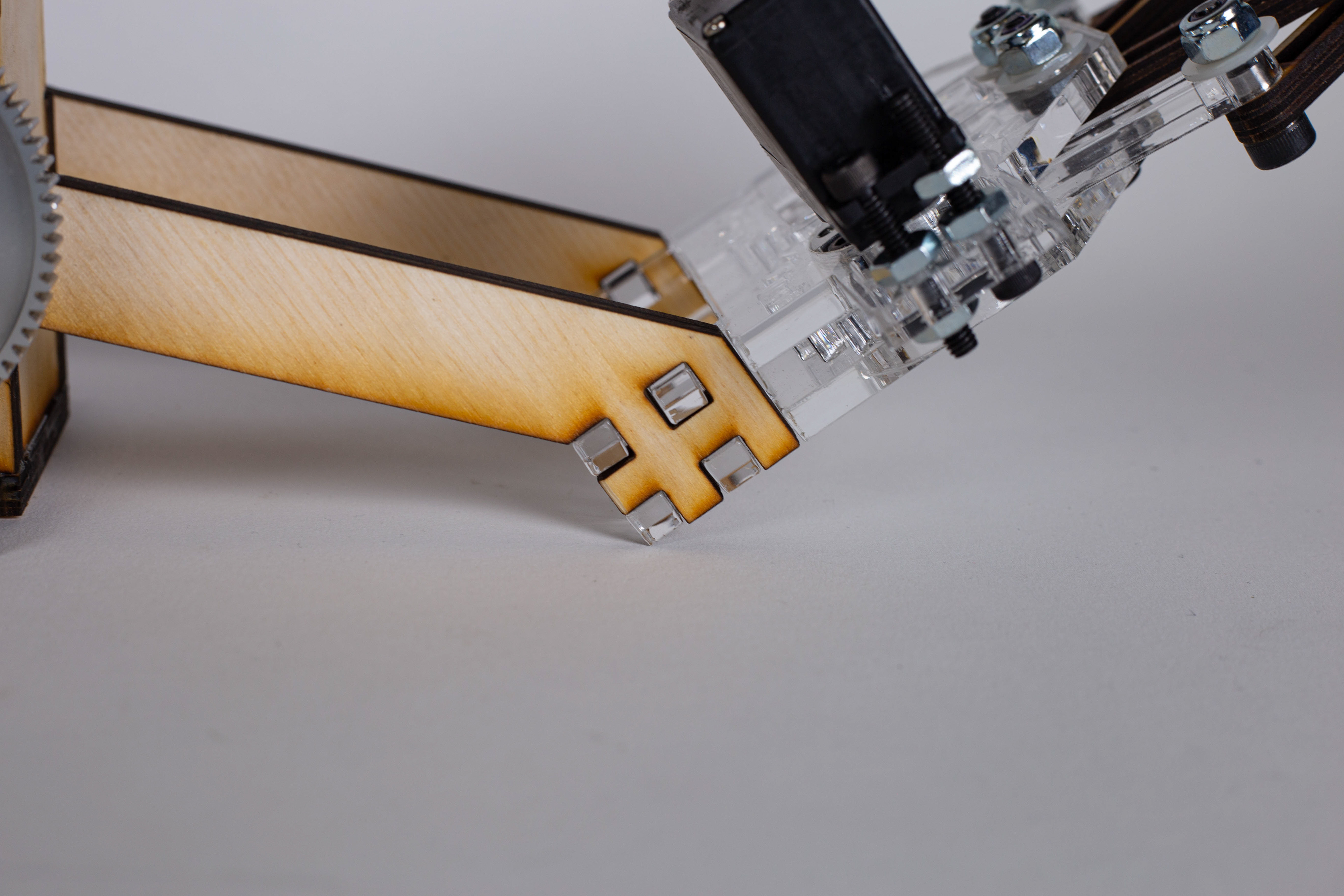
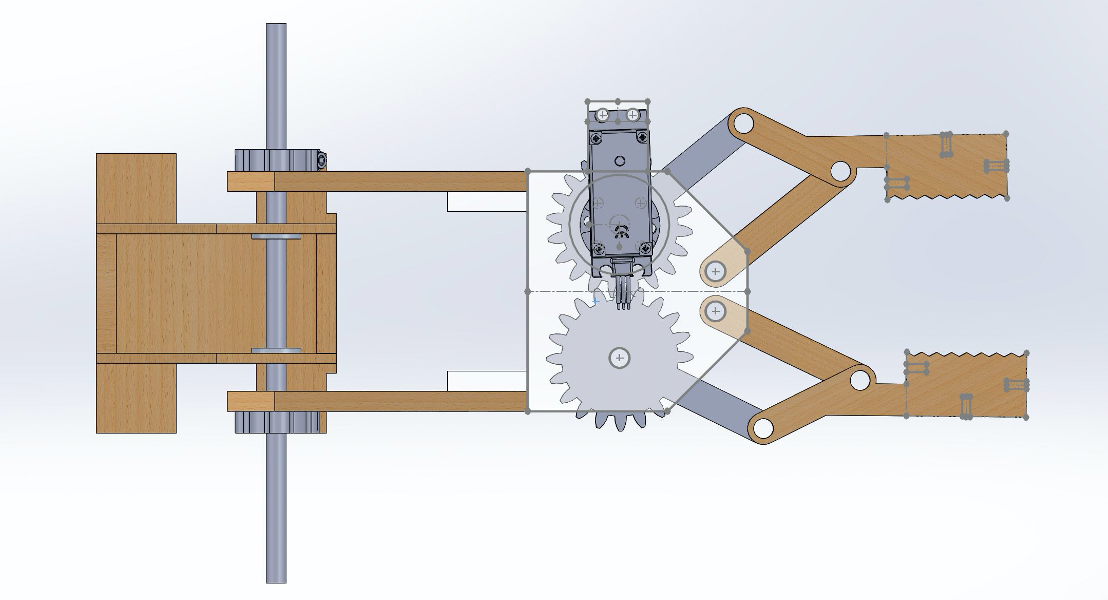
Connection
Project Overview
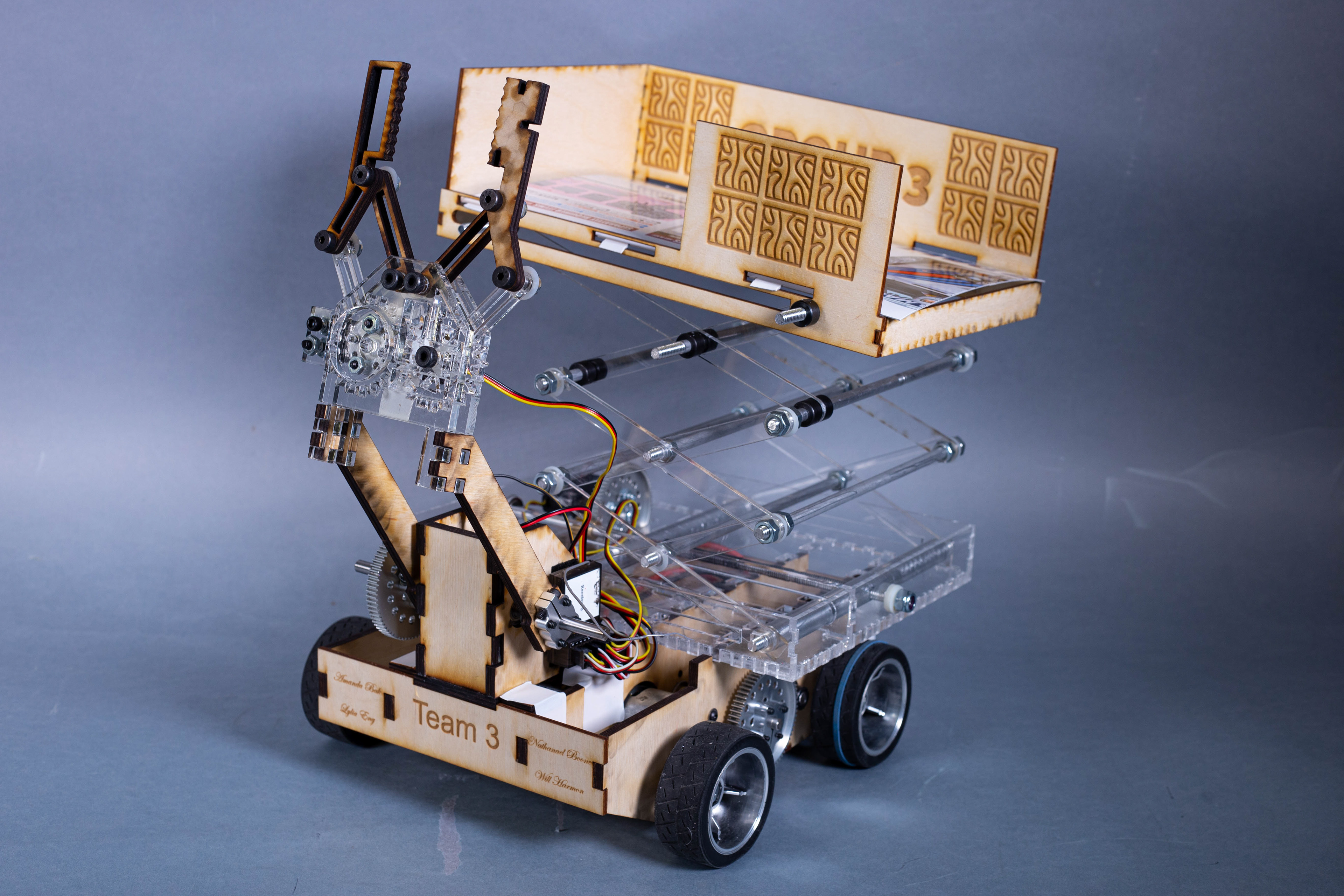
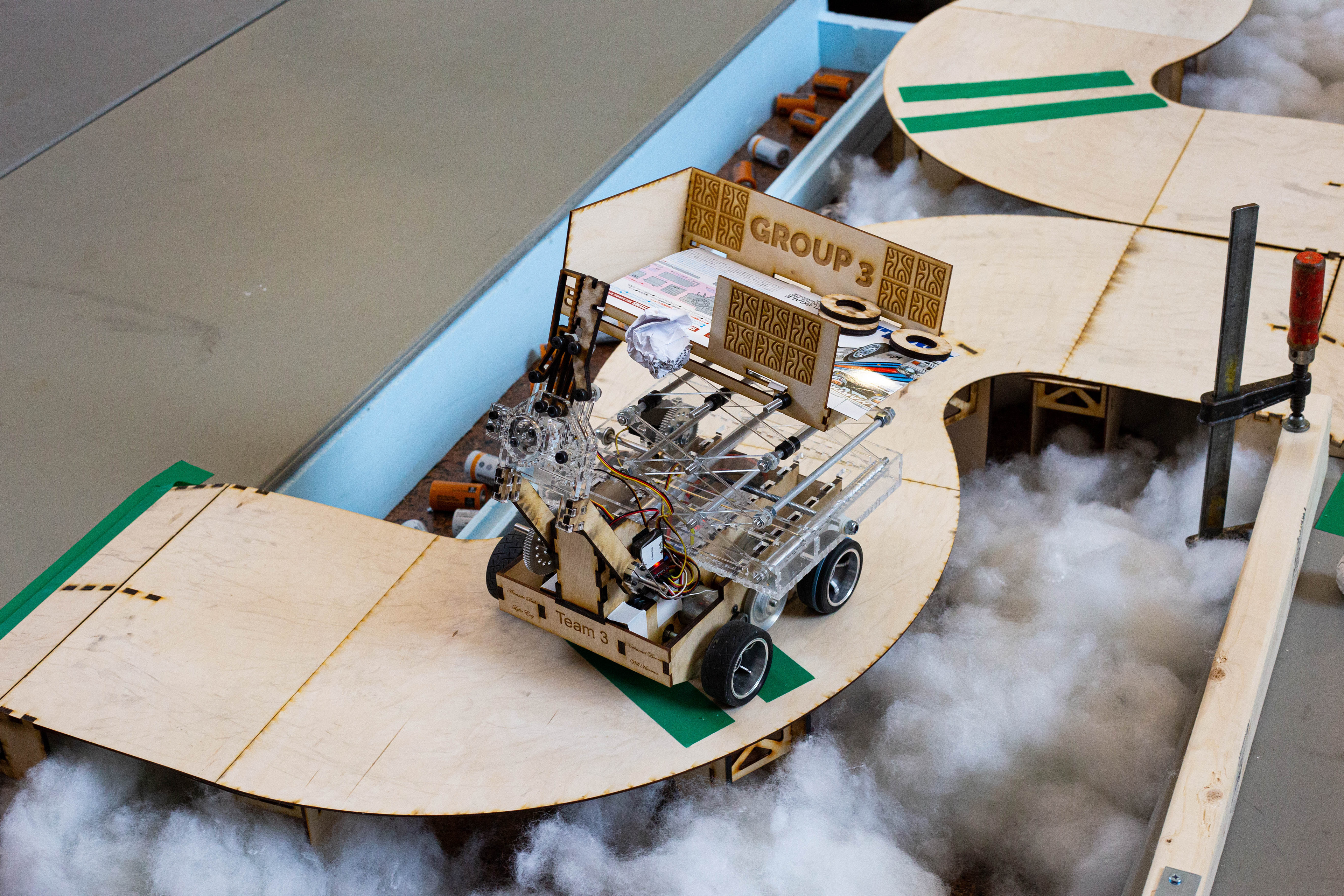
For my Machine Engineering class, we were tasked with creating a robot that could move, grab, and deposit paper balls, wooden rings, and/or batteries, constrained to a volume of 12" x 12" x 12". Our bot went head to head against other teams' bots in a competition: the goal was to score as many points as possible by retrieving items and depositing them into the receptacles around the game stage during 5-minutes.
The primary design constraints were time, materials, and game strategy. We had less than 7 weeks and were given a set list and quantity of materials that could be used. We decided to aim for the paper balls and wooden rings, ultimately driving us to design 2-motor chassis for maneuverability, a claw for retrieval, and a scissor lift for depositing.
This project was challenging in many ways, but overall, it was an extremely rewarding experience and most of all, a lot of fun!
Design Process
Our team explored several different design concepts before arriving at our final design. Some of our earlier prototypes included: 3-wheel and 4-wheel driving for maneuverability, an elevator drop and shovel for retrieval, and a 4-link lift and catapult for depositing. We ultimately decided on 2-wheel driving for a minimal turning radius, the claw for precision and reliability, and the scissor lift for maximum load capacity.
From hand sketches to CAD to laser cutting to assembly, I designed and built the final prototypes for the claw and the tower. I went through 5 iterations of the initial design concept, continuously changing different aspects of the claw and tower: the grabber shape, the claw base plate, and the servo mountings, just to name a few. I also analyzed gear meshing dynamics, tested the capabilities of the servos, and debugged any radio control issues, overall verifying that we would be able to successfully pick up paper balls and wooden rings with the claw and lift them vertically to our scissor lift with the tower.
Key Takeaways
This project was one of the most rewarding and challenging experiences I've had as a mechanical engineer. I really enjoyed the creative liberty and the competitive nature of the project, and I was aggressively pushed to grow technically and personally.
I learned so much. Engineering knowledge wise, I was introduced to fundamental concepts related to motors and gears. Technically, I feel more comfortable fabricating parts in the machine shop and proficient in CAD modeling with SolidWorks. And lastly, as another team experience, I learned more about communication, reflection, and innovation.
Upon completion of this project, I feel much more confident in my skills as a mechanical engineer and as a team player.
Skills & Documentation
Skills: Machine Engineering | SolidWorks | DFM | GD&T | CNC Mill | CNC Lathe | Laser Cutting
Documentation: Project Description, Written Report
A special thanks to my teammates: Lylia Eng, Nate Boone, & Will Harmon

Game Stage
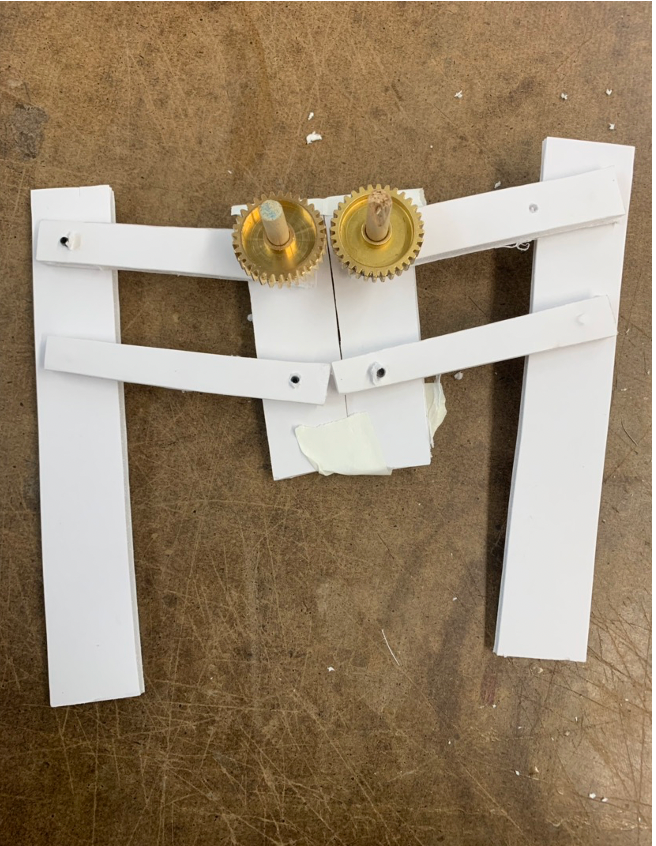
Claw #1: Prototype
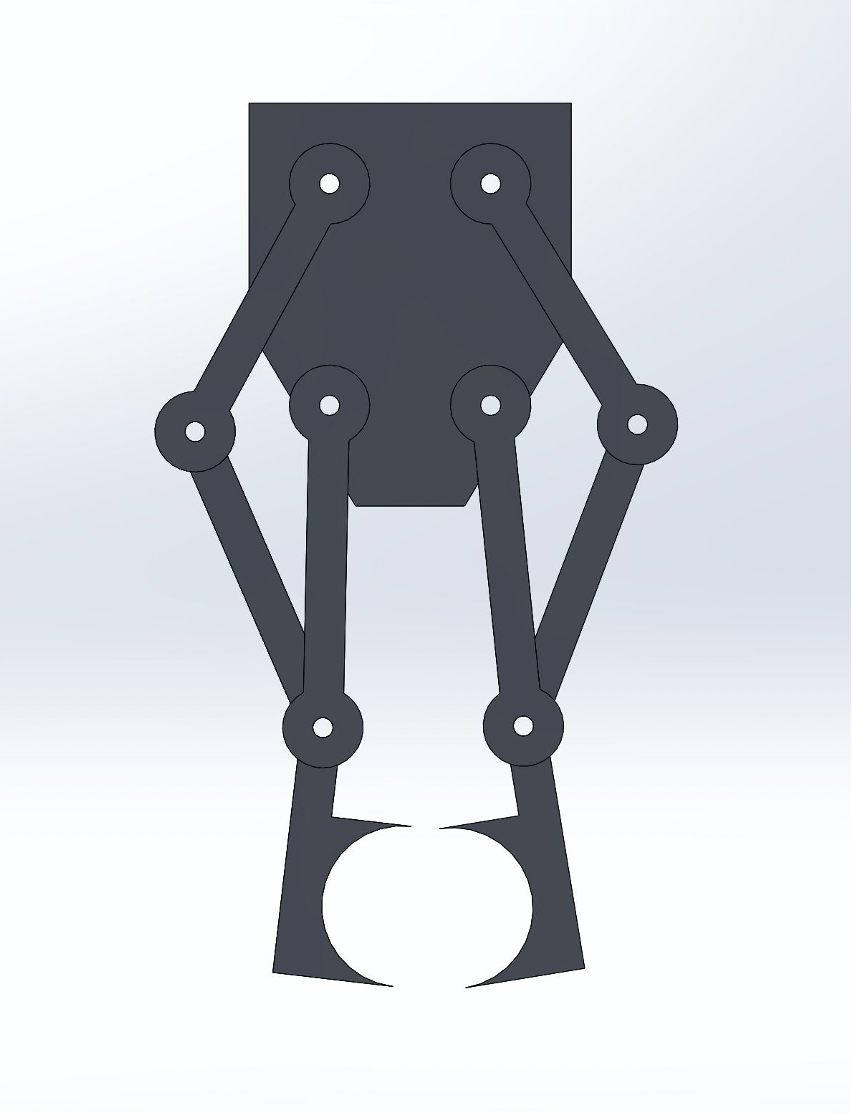
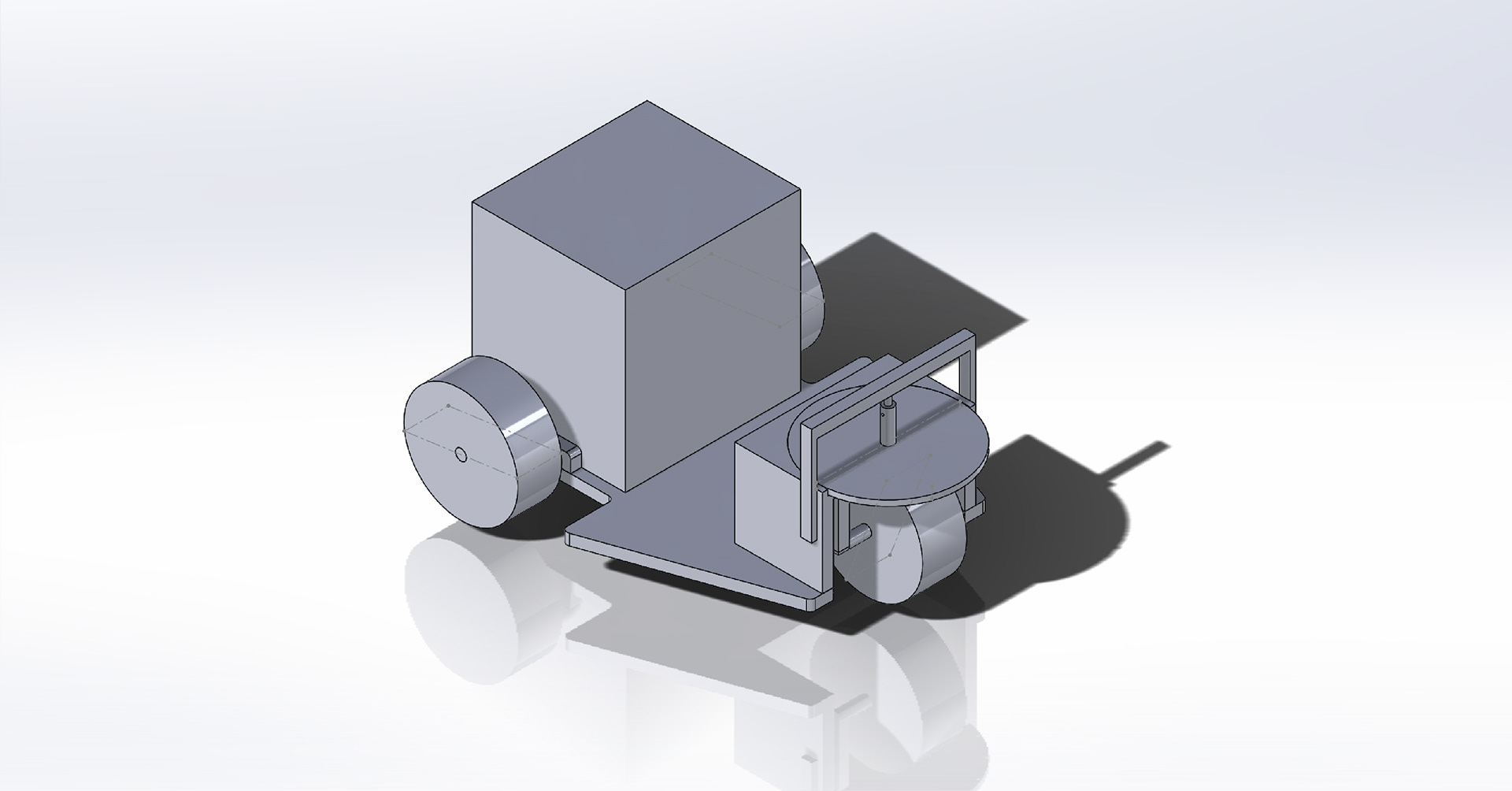
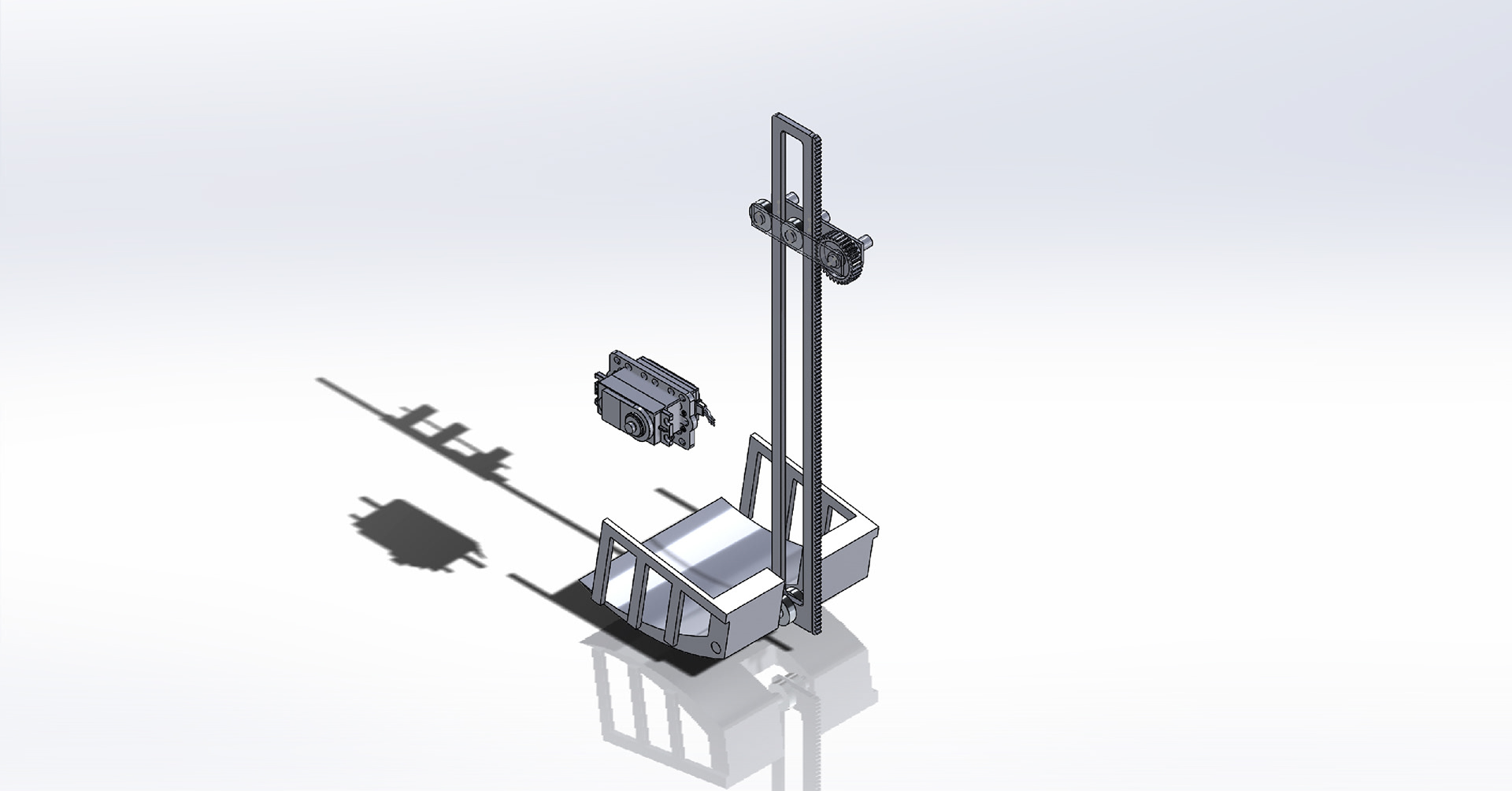
Claw #2: CAD
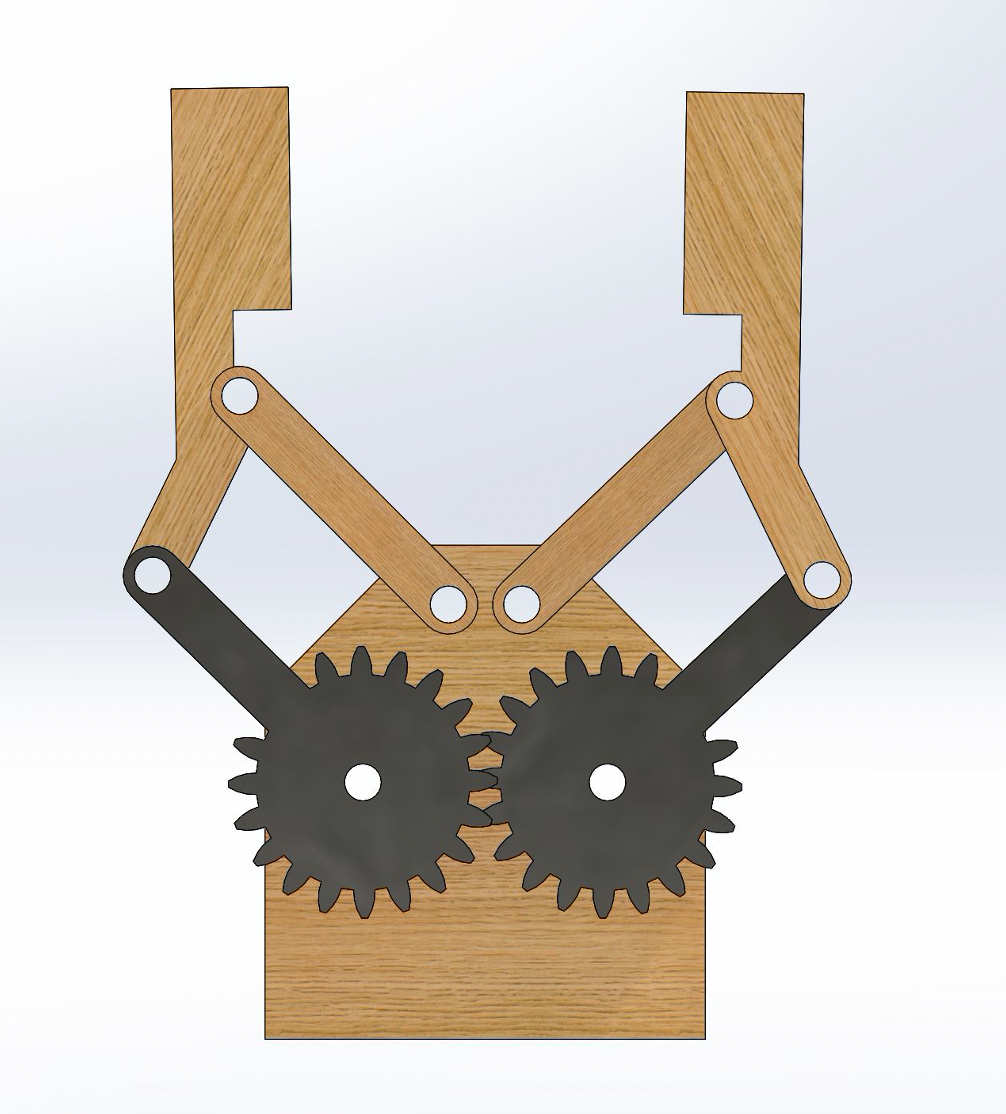
Claw #3: CAD
Claw #4: CAD
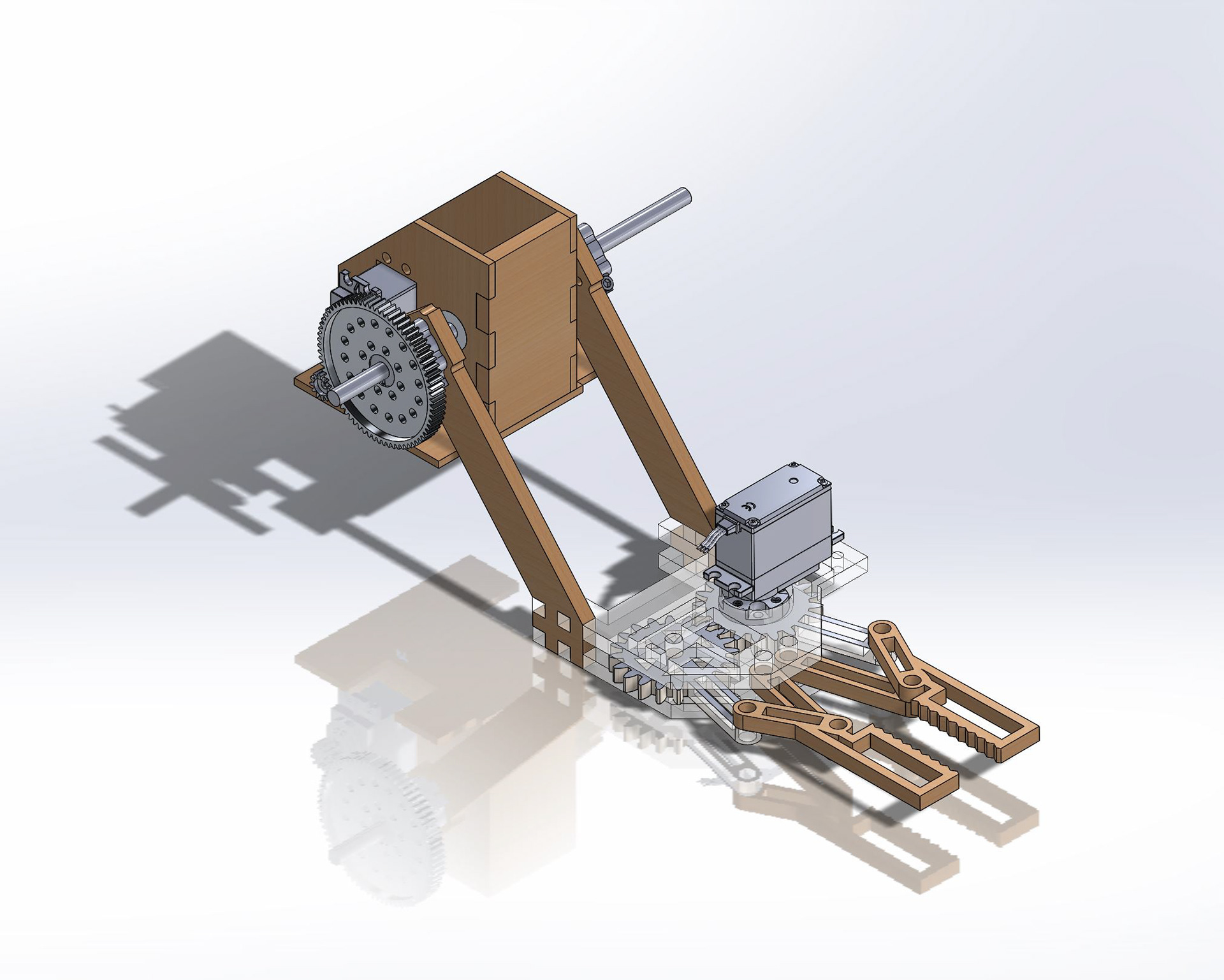
Final Claw: CAD

Laser Cutting: Wood
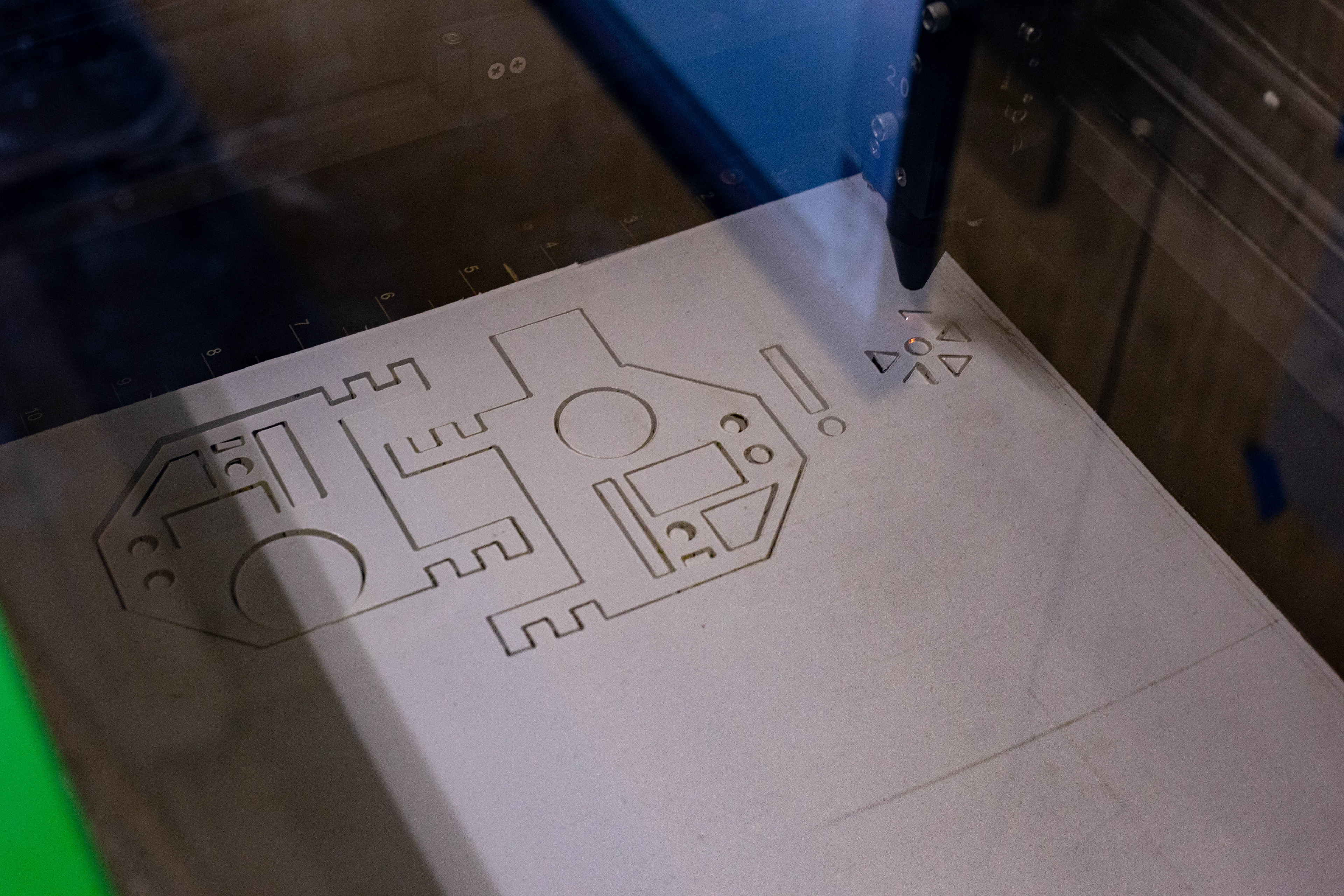
Laser Cutting: Acrylic
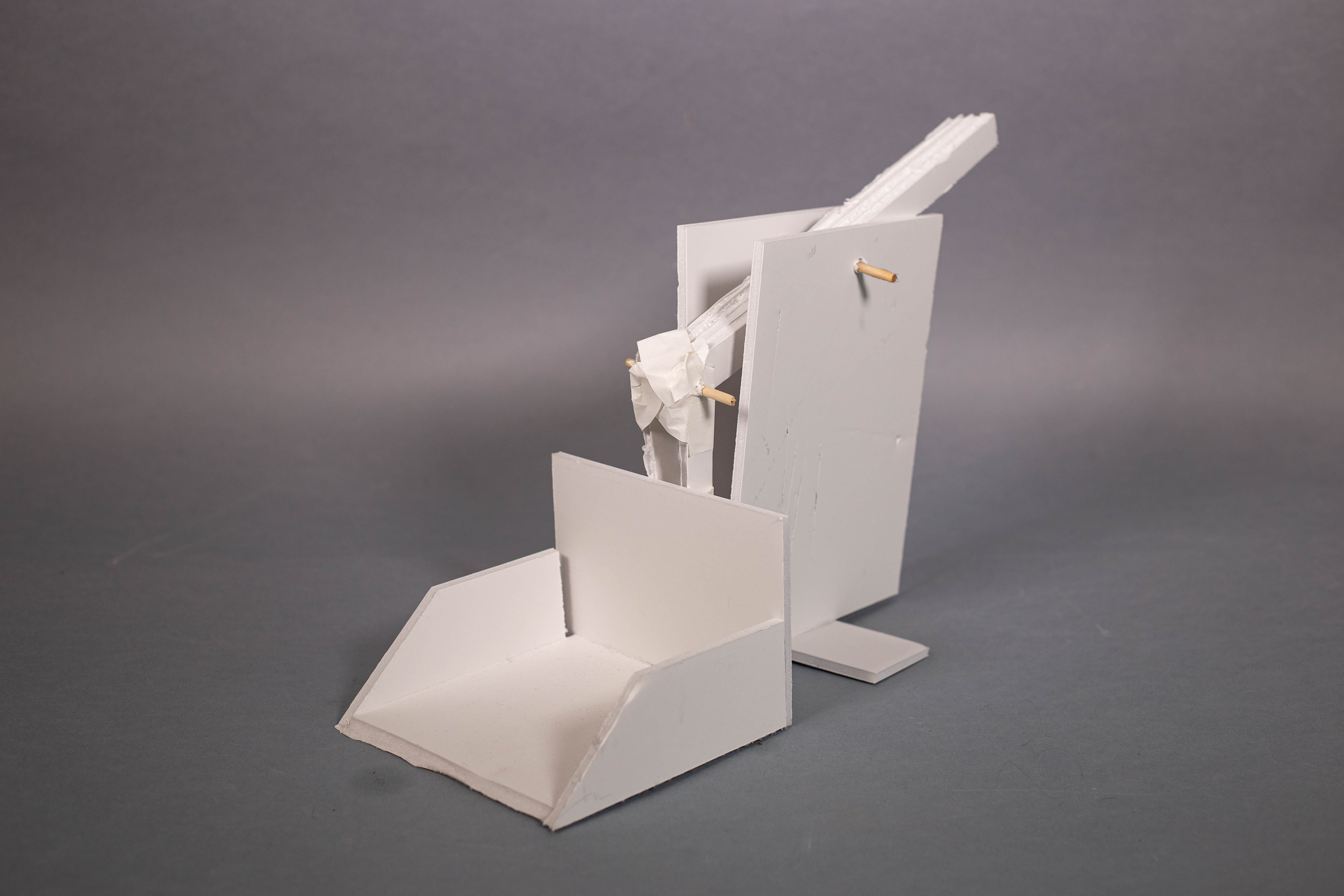
Shovel Idea: Prototype
Elevator Idea: CAD